プラレールのCBTC化
現役時代に長年CBTCに携わってきたので、退職後は時間を見つけてプラレールのCBTC化に取り組んでいます。仕事がなかなか忙しいので、既に一年が経過しました。HOゲージだと高いし、Nゲージだとスペースがない。ということで、価格も手ごろでスペースもそこそこあるプラレールに目を付けました。
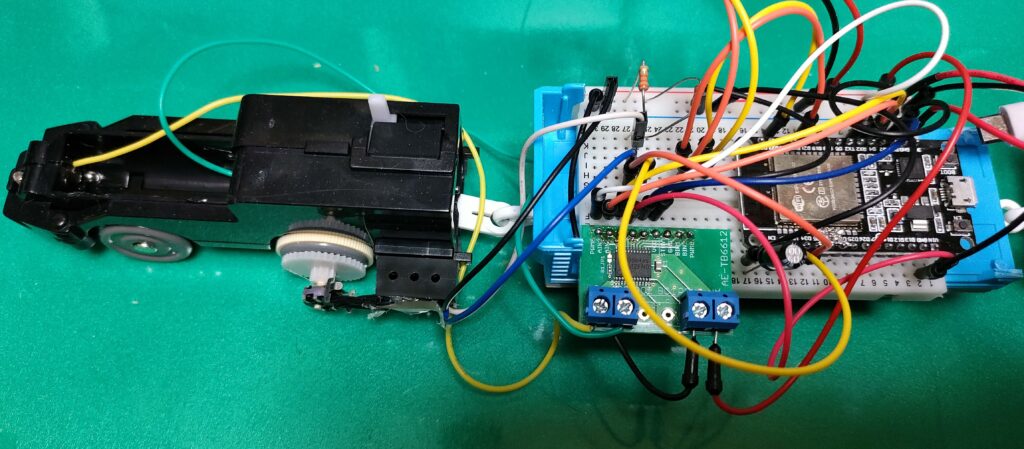
プラレールは単三電池一つでDCモーターを駆動しています。まずは、車上装置で速度制御するかなということで、DCモーターをPWM制御することでノッチとブレーキを再現してます。アクティブなブレーキは搭載していません。8ビットのでD/Aしていますが、そこそこ速度制御はできるようです。速度制御ができると、今度は速度照査と位置検知です。そのために速度発電機いわゆるTGをつけようと思いますが、実は、世の中のCBTCはTGではなくパルスカウント方式のパルスジェネレーターが一般的です。なので、私も「PGにするぞー」と張り切りました。車輪に穴をあけて、外側から近赤外LEDで光を照射して、内側でフォトダイオードで受ける仕組みです。実際に構築してみましたが、チャタリングが大きくてそれを制御するのが難しい。ここで方針を変更して、車軸にロータリーエンコーダーを取り付けて車輪回転を検知する方式に変更しました。これが意外とうまくいきました。
その結果、今は速度制御、速度照査と相対位置検知ができてます。速度照査はあまり意味がないので速度制御だけで十分かと思います。まだ、地上からMAを送るところまではできていないので、タブレットを使用してMA指示を送ってます。
今開発しているのは地上子です。CBTCには位置補正用の地上子は必須です。実際の地上子は電磁結合でIDを送っていますが、それを小型化するのは現実ではありません。いろいろアイデアを考えましたが、今のところ、RGBのLEDで3ビット(7値化)ができないかということです。試しに、RGBのLEDをRGBカラーセンサーで読み取り色を区別できないか確認してみると、閾値を調整する必要はありますが、なんとか行けるかなぁと思っています。まだ、基板を作っていないのでブレッドボードボードの状態ですが。